


Section: New Results
Neuroprostheses and technology
Selectivity of nerve stimulation using a 12 pole multipolar cuff
Participants : Wafa Tigra, Olivier Rossel, Thomas Guiho, David Guiraud, Christine Azevedo Coste, Hubert Taillades [UM] .
Experimentations were performed on 5 rabbits (New Zealand white). A multipolar cuff electrode (12 poles, diameter 3 mm, length 20 mm, 12 oblong contacts of 5mm length) was placed around the sciatic nerve of the rabbit 3 cm above the tibiofibular bifurcation. The nerve was stimulated with increasing intensity. The protocol consisted of the activation of one or more channels of the electrode, the input is a biphasic asymmetric stimulation and the pulse width is modulated in intensity (up to 2.4 mA) and fixed in length (250 sec, 100 sec interstim). A stimulus (4 Hz) is used for 2 seconds. 48 configurations of stimulation were tested. Needle electrodes were inserted on the lateral and medial gastrocnemius, soleus, tibialis and extensor digitorum muscles to record EMG signals and were used to evaluate the selectivity capacities of given cuff electrode configuration. The rabbit foot was also attached to a force platform. Inter-fascicular selectivity was observed for the 5 animals. Intra fascicular selectivity was also observed in 3 animals. Placed at a single location, our cuff electrode is capable to activate, selectively, some muscles. Experiments were performed under ethical comittee agreement at the "Plateau Technique Chirurgie Exprimentale" (Montpellier).
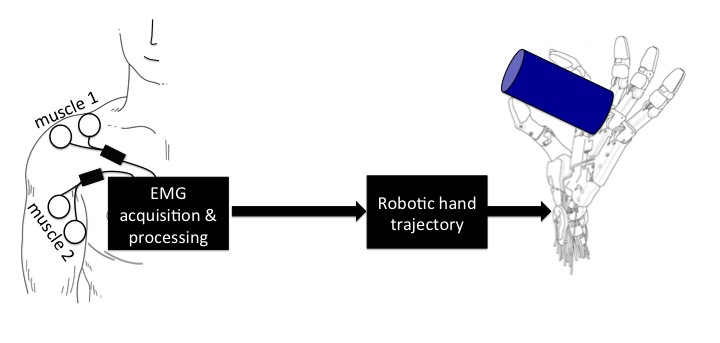
A novel EMG interface for individuals with quadriplegia to pilot robot hand grasping
Participants : Wafa Tigra, Benjamin Navarro [LIRMM] , Andrea Cherubini [LIRMM] , Xavier Gorron [???] , Anthony Gelis [PROPARA] , Charles Fattal [CRF DIVIO, Dijon, France] , David Guiraud, Christine Azevedo Coste.
We have developed and validated a new human-machine interface dedicated to individuals with quadriplegia. We investigated the feasibility of online processing sus-lesional muscle responses, to pilot an assistive device. The ability to voluntary contract a set of selected muscles was assessed in five spinal cord injured subjects through electromyography analysis. Two subjects have also been asked to use the EMG interface to control palmar and lateral grasping of a robot hand (fig.8 ). These preliminary results sound very promising and open the way to new interface solutions for high level spinal cord injured patients(fig.8 ).
|

Wearable 56-pole stimulator
Participants : Arthur Hiairrassary, David Andreu, David Guiraud, Olivier Rossel, Thomas Guiho.
In the context of the EPIONE European project, we have designed and developed, with Axonic, a wearable multichannel stimulator (fig.9 ), to face phantom limb pain (PLP). This 56-pole neural stimulator is based on four 16-pole stimulation units (each one being connected to a 16-pole TLIFE intra-fascicular electrode) connected to a real-time controller by means of an embedded deterministic network. This controller, in charge of executing FES functions (threshold determination, sensation characterization, etc.), pilots the stimulation units and allows for real-time modulation of the multisite stimulation. The controller can be remotely configured and exploited by the practitioner, by means of a dedicated software (Synergy Neuromodulation Software). But it has been also connected to the controller of the EPFL's artificial hand, in order to link hand touch sensors with neural stimulation to induce natural, meaningful sensations to the amputee.
This stimulator has been deeply validated through animal experiments (rats and pigs, respectively with UAB Barcelone and SMI Alboorg) and is currently used on human at UCBM Rome (http://project-epione.eu/ ).

CORAIL: Neural Stimulation Integrated Circuit
Participants : Jérémie Salles, Guy Cathébras, Milan Demarcq, David Guiraud, Guillaume Souquet, David Andreu.
DEMAR is currently finishing the development of CORAIL (Current Output Reconfigurable Asic Interface Low power), a new ASIC dedicated to electric neural stimulation.
Its main analog characteristics are:
This front-end integrated circuit is designed to perform multipolar electrical stimulation of the nerve with highly configurable waveforms in order to achieve selective activation of organs or muscles. In comparison with previously developed current output ASICs, the CORAIL IC embeds new features such as the storage of multiple electrode configurations or the possibility to internally combine poles. These specific aspects of CORAIL and the fact that its elaboration benefited from clinical experience in the team will allow enhanced integration within the whole electrical stimulation environment.
The resulting stimulation ASIC aims to be part of an implanted distributed stimulation system, composed of multiple stimulation units spread across the body, in which CORAIL will be the front-end entity in charge of delivering the current to the electrode. Thus, special care has been paid to its integration in such a network with an emphasis on low power consumption for which different mechanisms have been implemented.
The ASIC is currently undergoing the last phases of its development and a first version is due for fabrication in February 2016.
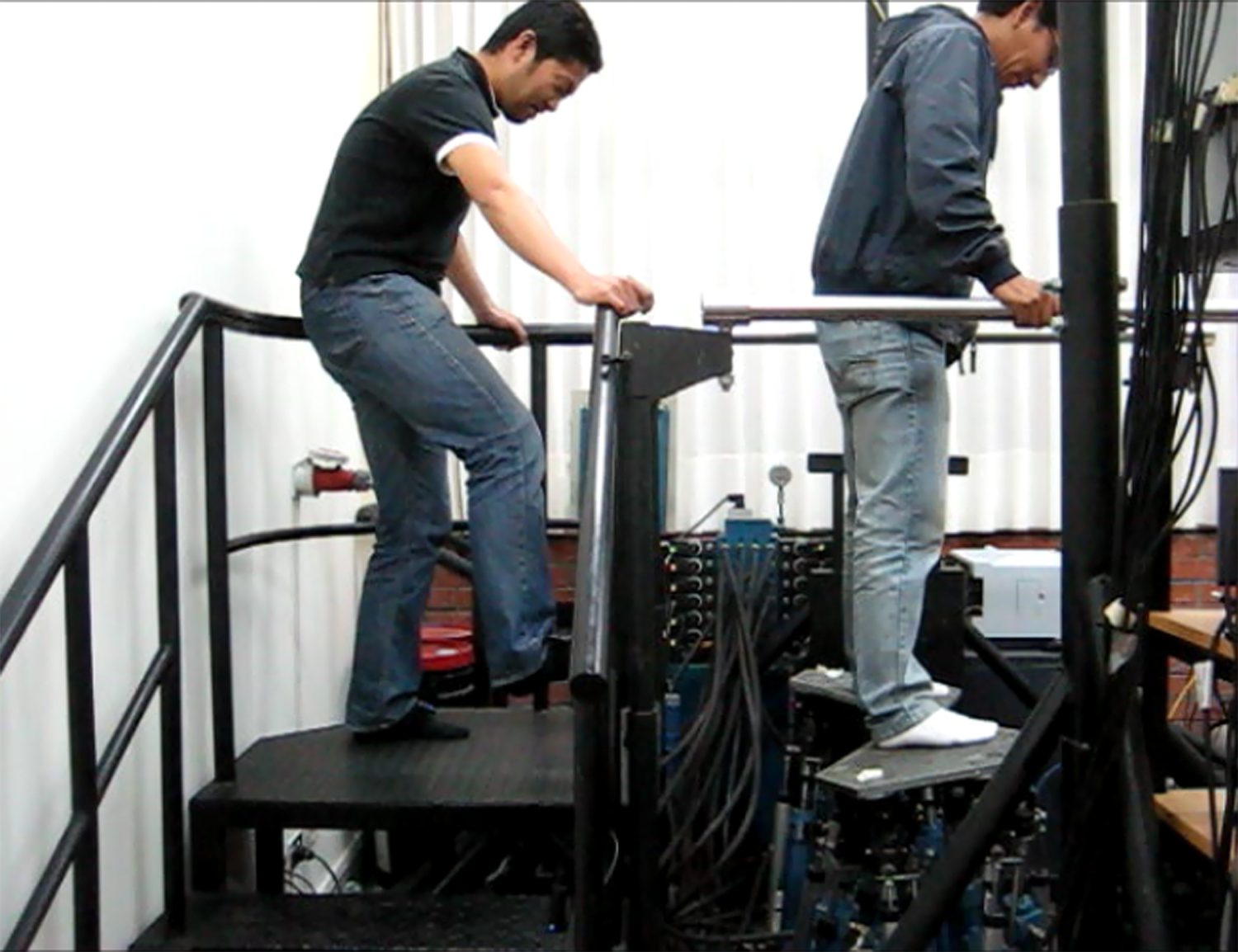
Tele-Rehabilitation Platform for Gait Training
Participants : Mitsuhiro Hayashibe, Antonio P.l. Bo [Universidade de Brasilia, Brasil] , Leslie Casas [Pontificia Universidad Catolica del Peru, Peru] , Gonzalo Cucho [Pontificia Universidad Catolica del Peru, Peru] , Dante Elias [Pontificia Universidad Catolica del Peru, Peru] .
Throughout the world there is an increasing need for better technologies for rehabilitation and assistance. These new solutions must present improved performance in terms of therapy effectiveness, while at the same time minimizing the corresponding costs. In this scenario, computer-aided methods represent a promising alternative for the challenges currently faced by the rehabilitation domain. A tele-rehabilitation platform for gait training in intercontinental circumstances is developed under STIC-AmSud program. This project was joint program 2012-2013 among Inria France, UnB (University of Brasilia) and PCUP (Pontifical Catholic University of Peru) for tele-rehabilitation framework. This system has two mode: Self-modulation control in which the subject can control the speed of the motion therapy with his comfortable training speed and Guidance control mode in which the motion transfer is performed from one therapist to one patient. Guidance control can be performed both with local data transmission and intercontinental data transmission. Fig. 10 shows the case where the motion transfer regarding foot placement was performed with local data transmission. The test with intercontinental data transmission was also realized between France and Peru.
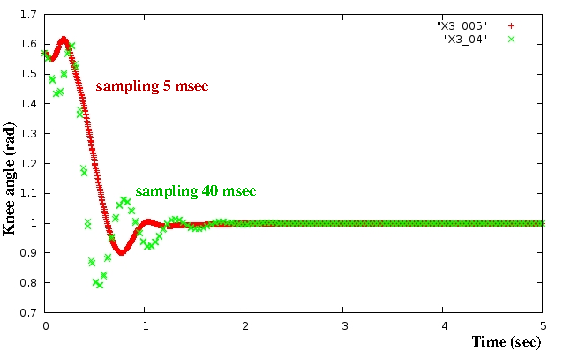
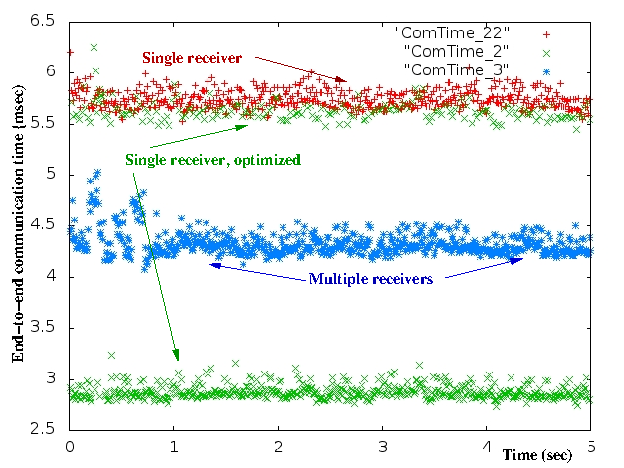
Control and scheduling co-design for stimulation systems
Participants : Daniel Simon, David Andreu.
Functional Electrical Stimulation (FES) is used in therapy for rehabilitation or substitution for disabled people. They are control systems using electrodes to interface a digital control system with livings. Hence the whole system gathers continuous-time (muscles and nerves) and discrete-time (controllers and communication links) components. During the design process, realistic simulation remains a precious tool ahead of real experiments to check without danger that the implementation matches the functional and safety requirements. To this aim we are developing a real-time open software simulation system, dedicated to the analysis of FES systems deployed over distributed execution resources and wireless links. The simulation tool is especially devoted to the joint design and analysis of control loops and real-time features.
Realistic simulations are effective tools to design and tune complex systems whose analysis cannot be provided only by theory. Several simulation steps can be explored, from simple functional analysis to HIL, to design, test, tune and validate both the single components of the system and their interactions in a distributed architecture. Simulations are precious, as they allow for non-destructive trials, which must be considered in any domain but this is of particular interest for bio-engineering [42] .
It is expected that this particular simulator may provide inputs in two main directions. Firstly it allows for preliminary testing and tuning new FES protocols without needing for real experiments with patients, and may help for writing the ethical protocols needed for any experiments involving livings. Secondly it can be used to preliminary evaluation of new technologies or implementations, without costly reworking of existing electronic chips or certified components.
The simulation software is open, so that enhancements w.r.t. to the original release can be added upon request of various designers and to fulfill various objectives.
Control loops design principles for autonomic computing
Participants : Daniel Simon, Eric Rutten [Inria Grenoble Rhône-Alpes] , Nicolas Marchand [GIPSA-lab] .
Computing systems are becoming more and more dynamically reconfigurable or adaptive, to be flexible w.r.t. their environment and to automate their administration. Autonomic computing proposes a general structure of feedback loop to take this into account. We are particularly interested in approaches where this feedback loop is considered as a case of control loop where techniques stemming from Control Theory can be used to design efficient safe, and predictable controllers. This approach is emerging, with separate and dispersed effort, in different areas of the field of reconfigurable or adaptive computing, at software or architecture level.
We aim at conveying to Computer Scientists the interest and advantages of adopting a Control Theory perspective for the efficient and predictable design of autonomic systems. Compared with open-loop, closed-loop control provides adaptability and robustness, allowing for the design of fault-tolerant systems against varying and uncertain operating conditions. However, there still is a deep need for research in the problems of mapping from high-level objectives in terms of Quality of Service (QoS) or Service Level Objectives (SLO) and abstract models towards lower-levels effective actions on the managed systems [46] .